| Start
Experimente
- Servo 1
- Servo 2
- Servo 3
Grundlagen
Produkte
Neues
Impressum
|
Versuche mit dem Servomotor, Teil 3

| Die bisherige Elektronik-Lösung mit vier Transistoren
hatte nur eine Verstärkung von 1 und zeigte deshalb ein starkes Nachhinken
der Regelung. Man braucht also eine höhere Verstärkung. Das ist
genau die richtige Aufgabe für einen Operationsverstärker. Die
Verstärkung lässt sich hier einfach einstellen und verändern. |

| Die Schaltung benötigt jetzt eine doppelte Betriebsspannung,
damit der Motor in beide Richtungen gedreht werden kann. Wenn man zwei
mal 5 V verwendet, können noch relativ kleine Leistungstransistoren
im TO92-Gehäuse eingesetzt werden. Im Versuch wurde der BC338 und
der BC328 verwendet.
Der Operationsverstärker arbeitet mit einer Verstärkung von
20. Deshalb ist auch die Regelgenauigkeit jetzt erheblich verbessert. Man
könnte durch Veränderung der Widerstände eine noch höhere
Verstärkung einstellen. Allerdings kommt man dann wieder an einen
Punkt, wo Regelschwingungen einsetzen. Verbesserungen bis hin zum perfekten
PID-Regler sind möglich.
Die Eingangsspannung des Reglers liegt nun im Bereich 0 bis 5 V. Man
kann entweder ein Poti anschließen oder den Eingang über ein
PC-Interface ansteuern. Das SIOS bietet sich an, weil es damit nur ein
kleiner Schritt vom manuellen Test zu einem automatisierten Ablauf ist.
Bei Versuchen mit dem SIOS kann die untere Versorgungsspannung von 5 V
direkt vom Interface abgenommen werden. Die zweite Spannungsquelle wird
von einem zusätzlichen Steckernetzteil bereitgestellt. Eine Alternative
zeigt das folgende Schaltbild:
|
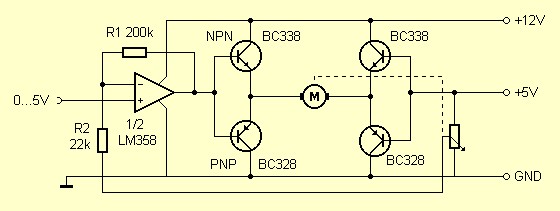
| Hier wird eine stabile Brückenspannung aus der
5-V-Versorgungsspannung des SIOS über zusätzliche Transistor-Emitterfolger
gewonnen. Die Versorgungsspannung von 12 V für das SIOS kann dann
für die Servos mit verwendet werden. So kommt man mit einem einzelnen
Netzteil aus.
5 Volt rein, 5 Volt raus, da könnte man auf die Idee kommen, die
beiden rechten Transistoren einfach wegzulassen. Aber das geht aus folgendem
Grund nicht: Im SIOS steckt ein integrierter 5-V-Spannungsregler, der zuverlässig
dafür sorgt, dass die Spannung nicht unter 5 V absinkt. Er kann aber
nicht verhindern, dass die Spannung über 5 V ansteigt, wenn man einen
Strom von außen zuführt. Genau das würde aber bei der Verwendung
als Brücken-Mittenspannung für eine Motorrichtung passieren.
Deshalb braucht man den Puffer.
Wer auch bei Fehlern in der enu aufgebauten Schaltung sicher sein will,
dass das SIOS nicht in Gefahr gerät, sollte lieber auf die Verwendung
der 5-V-Spannung vom SIOS verzichten und mit externen Netzteilen arbeiten.
|
| Programmierung
Der Servomotor kann nun einfach über einen Analogausgang des SIOS
gesteuert werden. Der Regelkreis wurde in die Elektronik verlegt, SIOS
steuert den Eingang des Reglers. Damit ist es ganz einfach, programmierte
Bewegungen zu erzeugen. Hier ein Beispiel:
PROGRAMM
Wiederhole
A-Ausgang = 200
B-Ausgang = 80
Warte 1 Sekunden
B-Ausgang = 110
Warte 1 Sekunden
A-Ausgang = 140
B-Ausgang = 140
Warte 1 Sekunden
B-Ausgang = 170
Warte 1 Sekunden
A-Ausgang = 80
B-Ausgang = 200
Warte 1 Sekunden
Bis Tastendruck
ENDE.
Wer genau hinschaut wird sich fragen, warum in diesem Programm denn
zwei Ausgänge gesteuert werden. Hier wurde schon auf die Möglichkeiten
vorgegriffen, die nun bestehen. Da pro Motor nur noch ein Ausgang benötigt
wird, kann man nun preiswerte Bewegungsmodelle mit zwei Motoren für
das SIOS-Interface bauen.
|

|
